Doctorant

Je suis doctorant en cotutelle entre l’université de Tunis, Tunisie et l’université de Toulon, France. Mon domaine de recherche concerne la mise en œuvre des algorithmes d’intelligence artificielle pour optimiser les conceptions en ingénierie ou résoudre des problèmes de robotique. Mes recherches actuelles portent sur le développement de dispositifs d’assistance et de pour les enfants atteints d’hémiparésie. L’objectif est de proposer un exosquelette de main optimal et efficace pour l’assistance aux enfants atteints d’hémiparésie.
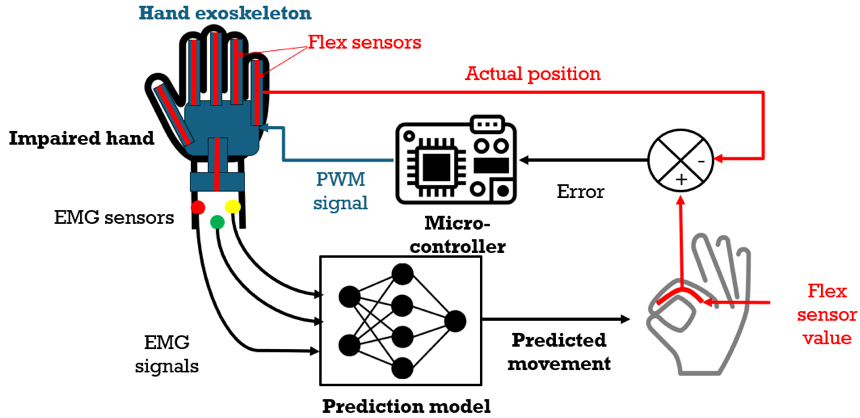
Titre de la thèse : Smart Exoskeleton Glove for Hand Assistance in Pediatric Hemiparesis
Résumé visuel du projet de thèse :
Pour me contacter :
Tél : 06 51 55 06 05
Courriel : mohamed-slim@etud.univ-tln.fr
Mes liens : ResearchGate
Principales publications :
- Slim, M., Rokbani, N., Neji, B., Terres, M. A., & Beyrouthy, T. (2023). Inverse kinematic solver based on bat algorithm for robotic arm path planning. Robotics, 12(2), 38.
- Rokbani, N., Neji, B., Slim, M., Mirjalili, S., & Ghandour, R. (2022). A multi-objective modified PSO for inverse kinematics of a 5-DOF robotic arm. Applied Sciences, 12(14), 7091.
- Rokbani, N., Mirjalili, S., Slim, M., & Alimi, A. M. (2022). A beta salp swarm algorithm meta-heuristic for inverse kinematics and optimization. Applied Intelligence, 52(9), 10493-10518.
Principales expertises :
- Robotique
- Optimisation
- Méthode des éléments finis